



What an electrifying few days we’ve had at Traffex 2023! Our Pavel Fojtik has been deep in conversations about the

Book a meeting with DataFromSky at Traffex 2023 in Birmingham, UK on Tuesday, June 6th. Register for the event for
Discover how video analytics technology is revolutionizing traffic data collection in the United States. Legacy technologies and requirements have long

Today we exhibited at the CEE Expo & B2B Forum: For Sustainable and Smart Urban Development in Budapest. We met

ITS Congresses Europe 2023 in Lisbon is in full swing and we are ready to welcome on our stand C16
In frontal car crashes, women face a significantly higher likelihood of sustaining severe injuries compared to men, with a 73

One week left till ITS Congresses Europe 2023 in Lisbon! Register using the link below and come visit us at

Are you struggling with analyzing large-area scenes packed with numerous small objects, irregular movements, and occasional occlusions for your traffic
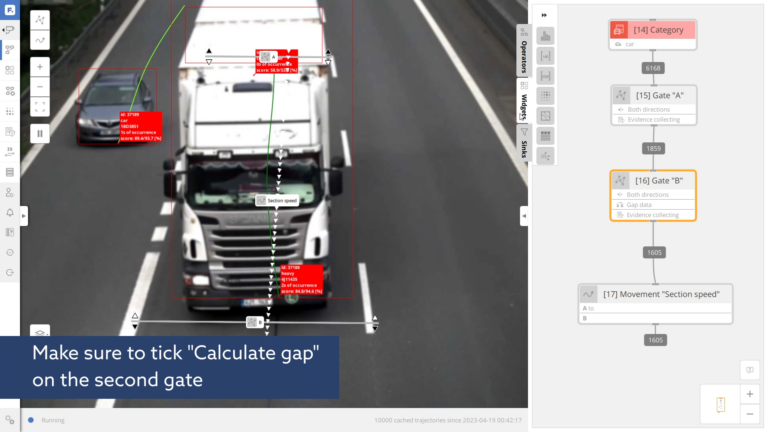
Gather evidence on section speed, gap times, and other traffic violations with FLOW 1.16! See how easy it is to

Wrong-way driving is a cause of 300-400 deaths a year and together with other traffic violations can be better prevented