

The PhD candidate Emmanouil Barmpounakis and his supervisors Dr. John Golias and Dr. Eleni Vlahogianni from The Department of Transportation Planning and Engineering at the National Technical University of Athens are using DataFromSky to study Powered Two Wheelers’ (PTW) overtaking phenomena using the principles of Game Theory:
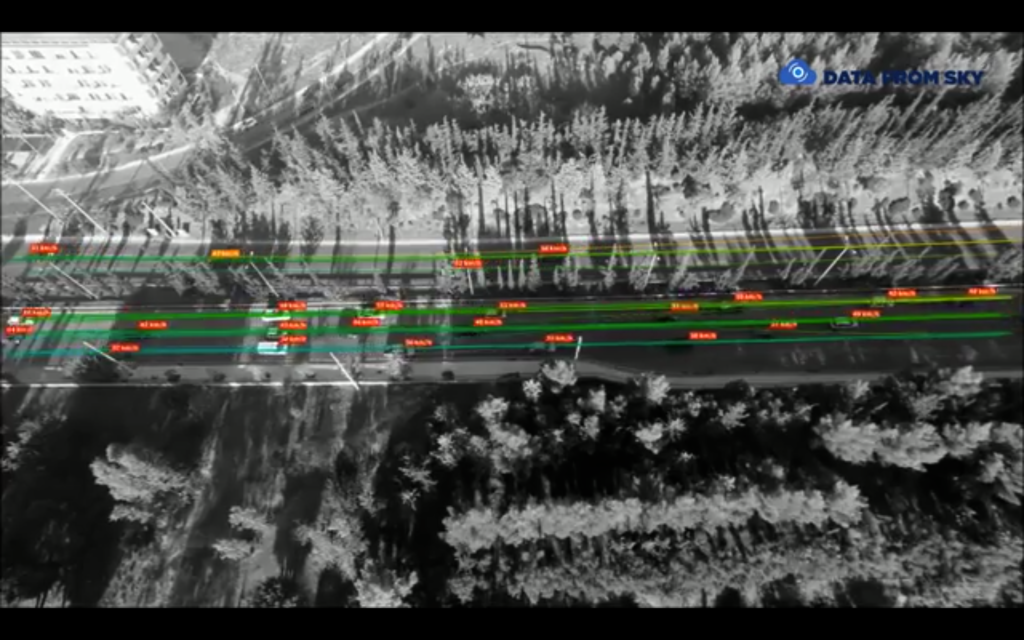
Both the PTW driver and the driver of the vehicle being overtaken are assumed to be rational decision-makers that develop strategies, while commuting in urban environment, trying to get the best outcome for their decisions. These strategies may be cooperative or not based on both drivers’ choices with respect to the distances and safety gaps they leave from the lead vehicle. Since PTW follow unorthodox trajectories, especially in an urban arterial, having detailed naturalistic data is essential, and this is how DFS comes in handy!We are always looking for partners from academic sphere. Are you a researcher in traffic or civil engineering? Don’t hesitate to contact us! This video is an excerpt with no motorcycles present. You can see some new features of the Viewer: a lateral acceleration heatmap, distance measurement, and a testing bounding box makes a guest appearance too. Heatmap overlay is a completely new feature: When activated, you can configure it to display a scalar value. You can currently select from various speed, count and acceleration types of quantity. The color map and its value range are configurable as well. References:
- Barmpounakis, Emmanouil N., Eleni I. Vlahogianni, and John C. Golias. “A Game Theoretic Approach to Powered Two Wheelers Overtaking Phenomena.” Transportation Research Board 94th Annual Meeting. No. 15-1425. 2015.
- Barmpounakis, E.N., Vlahogianni, E.I., & Golias, J.C. (2016). Intelligent Transportation Systems and Powered Two Wheelers Traffic, IEEE Transactions on Intelligent Transportation Systems, 17(4), 908-916. http://doi.org/10.1109/TITS.2015.2497406
- Barmpounakis, E. N., E. I. Vlahogianni, and J. C. Golias. “Vision-based multivariate statistical modeling for powered two-wheelers maneuverability during overtaking in urban arterials.” Transportation Letters: The International Journal of Transportation Research (2015): 1942787515Y-0000000020