
Latest news
DataFromSky Academy program
🧑🎓 Proud of our academic roots, we collaborate with numerous research partners, pushing the boundaries of traffic understanding further every


🧑🎓 Proud of our academic roots, we collaborate with numerous research partners, pushing the boundaries of traffic understanding further every

🚗 Smart parking solution is a key part of every modern city infrastructure. In our webinar, we will discuss all

🚗➡️💥 Running into a wrong-way driver on the highway is unimaginable. “In the USA alone about 350 people die every
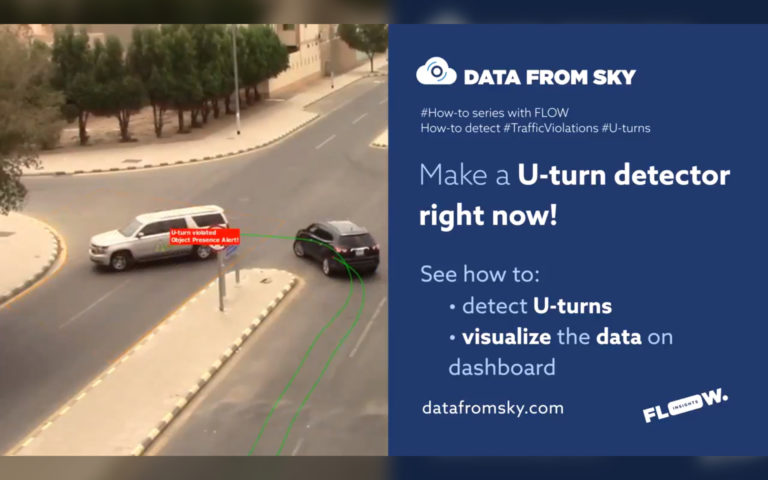
↪️ 🚚 To U-turn or not to U-turn? U-turn can save you some time but can be a very dangerous
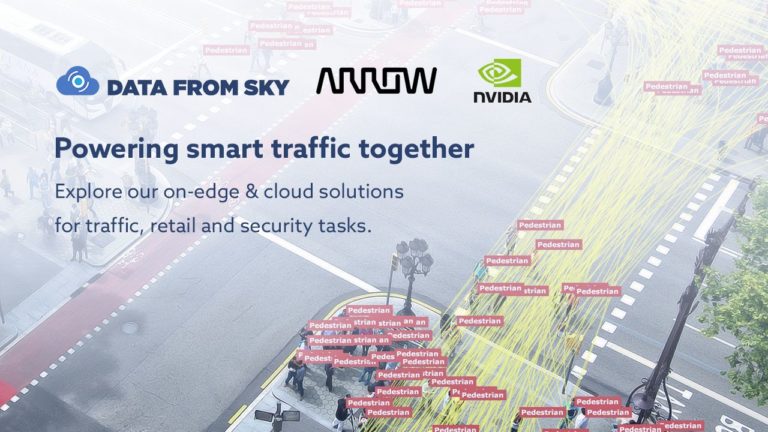
We are proud to annouce our partnership with Arrow services, a leading technology integrator. ⚙️ Together, DataFromSky, Arrow Global Services,
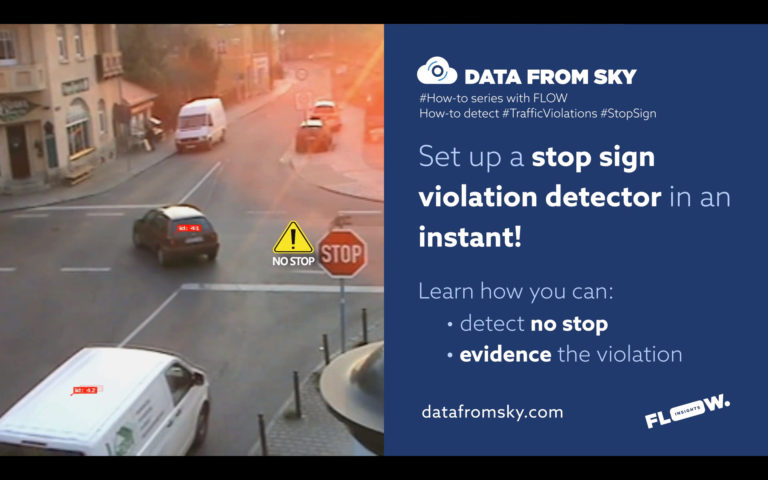
🚦 🚗 “Nearly 700,000 police-reported motor vehicle crashes occur annually at stop signs, and one-third of these crashes involve injuries.”*

Did you know that FLOW can detect various traffic violations, too? 🕵♀ Turn any camera into a traffic violation detection

Last year was challenging for all of us. Nevertheless, we’re still growing and pushing the boundaries of our field successfully!
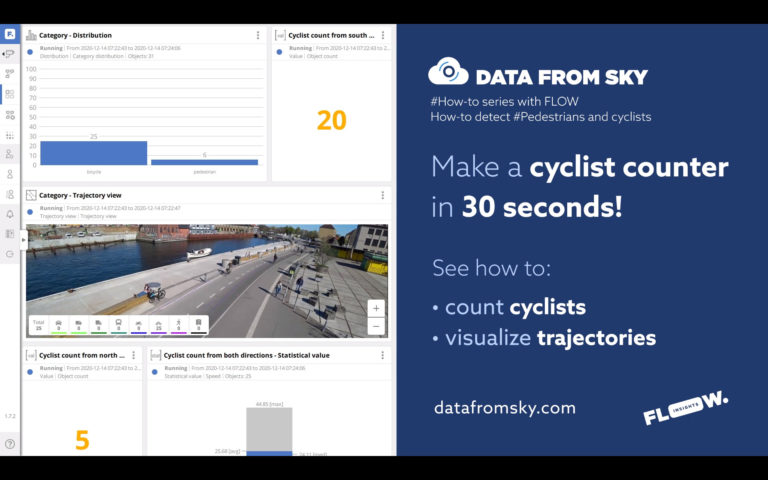
🎥 🚴 🚴 🌇 Improving cycling infrastructure helps not only by lowering traffic levels, but it also brings environmental and
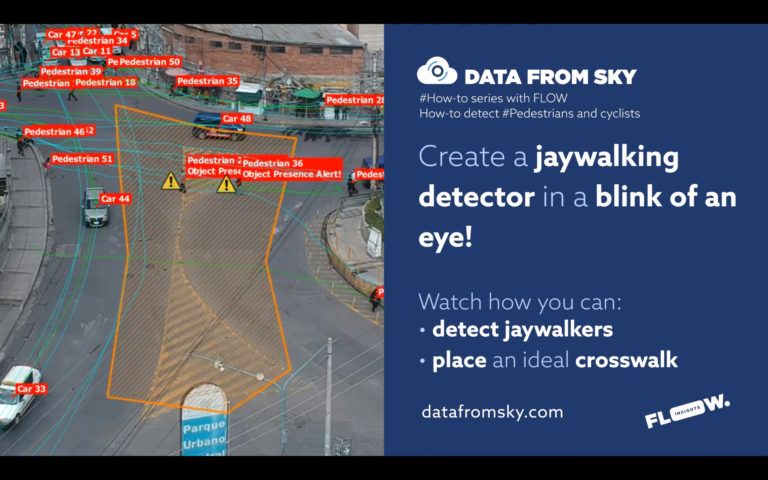
🚦 🚶 🚗 “More than 270 000 pedestrians are killed on roads each year.” (WHO, 2013) Jaywalking is one of